Progress Update on 6 Axis Arm
I don't usually like posting things that aren't done but are actively being worked on. This is an exception because I mentioned it in some applications. The details will be light but I'm hoping the pictures I provide will be informative.
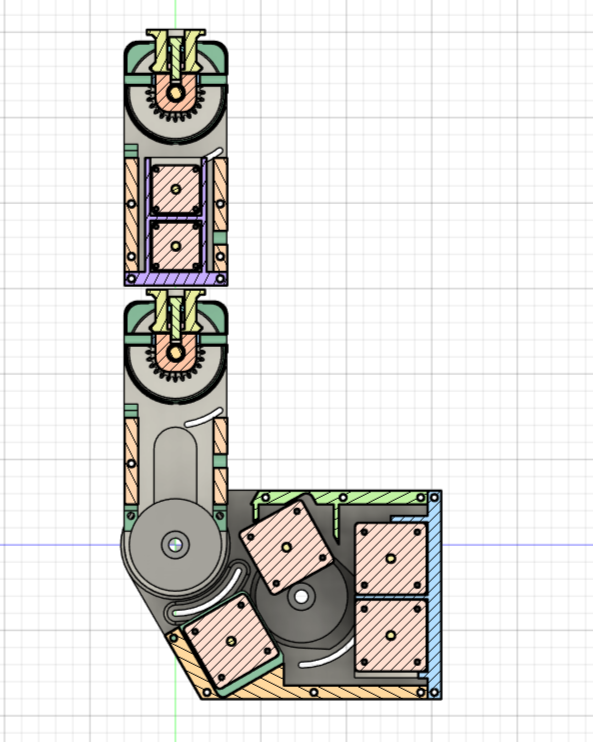
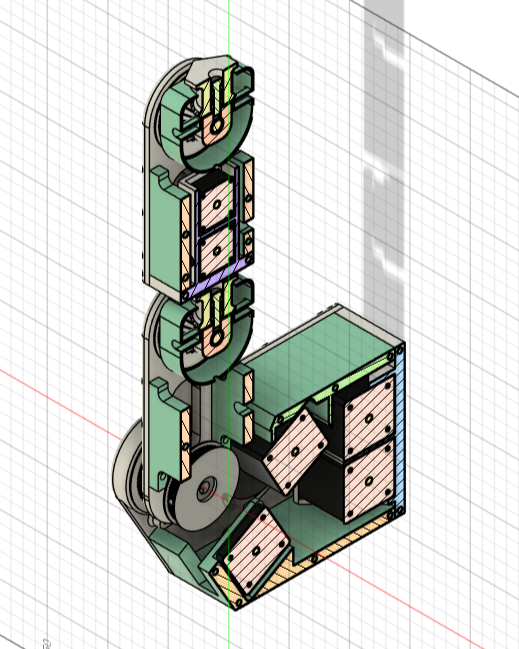
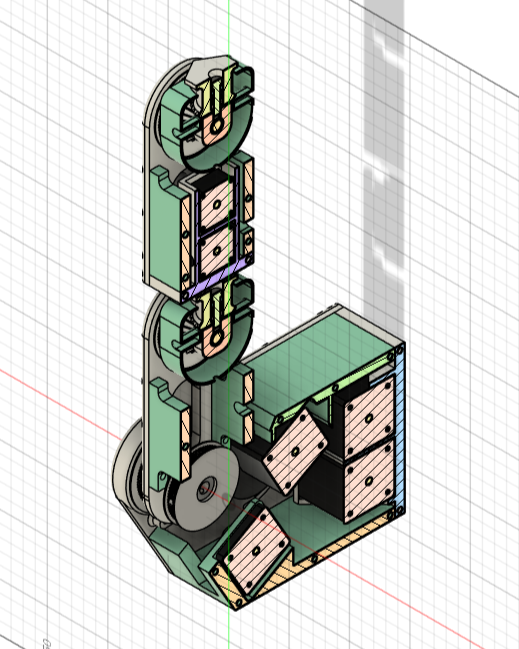
As you can see, there are a few unorthodox design choices I made here. The most important I think is having the elbow joint motors in that base piece so they don't have to be lifted by the shoulder. They will be rotated around a still to be designed joint, but that is just inertia so it is less of a concern. I think this will work as is but I cannot test fully because ServoCity is backordered on the belts I want. I tried splicing my own gt2 timing belts and that was a huge failure. My biggest concerns are belts skipping and motors not having enough torque. The former can be solved with wider belts. I might redesign it to use these anyway because McMaster Carr has not problem keeping their stock in stock. The latter I will either solve by a more aggressive pulley reduction or a somewhat silly reuction with worm gears and pulleys. Of course, if I sweitch to worm gears I might bite the bullet and make this a cable driven systemm and forgo belts altogether but I really hope it doesn't come to that. My math and early testing make me thing that the 20:1 reduction I have for the shoulder and elbow should be enough but I can't help but worry.
Anyway, some other design choices I made were having differential gearboxes for the wrist and the elbow as well as using magnets for limit switches. I mentioned this in an older post and called it easy. It mostly is but getting the meshing and tolerance right is a little tricky. 3D printers aren't great for gears and I should redesign this to be more adjustable but I want to make sure it works before I go around improving things on the margin. As for the magnets, I'd actually like a full absolute position feedback but I didn't quite know how to fit that in so that's for the next version I guess. If you look closely, or at all really, the wrist/forearm are almost identical to the elbow/upper arm assemblies. This was a choice I made to save myself design work but I really do think it's a good idea to have the differential in the elbow like that I think it is neat and will work well.