Another Update On My 6-Axis Robot Arm
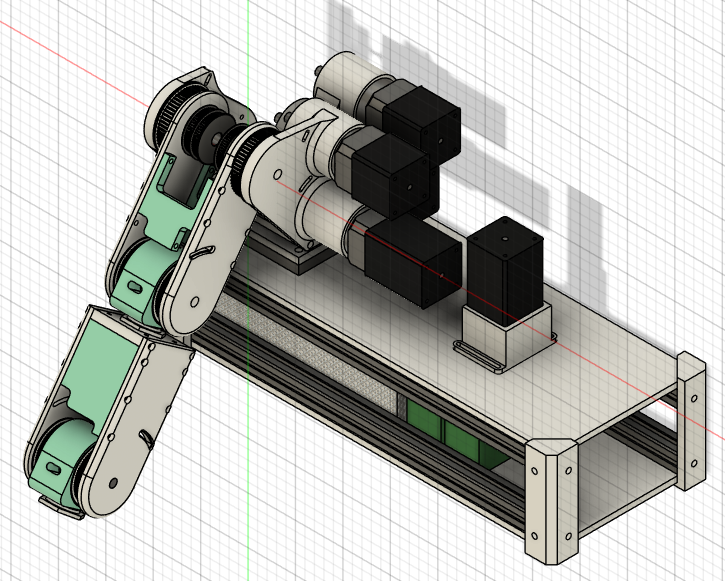
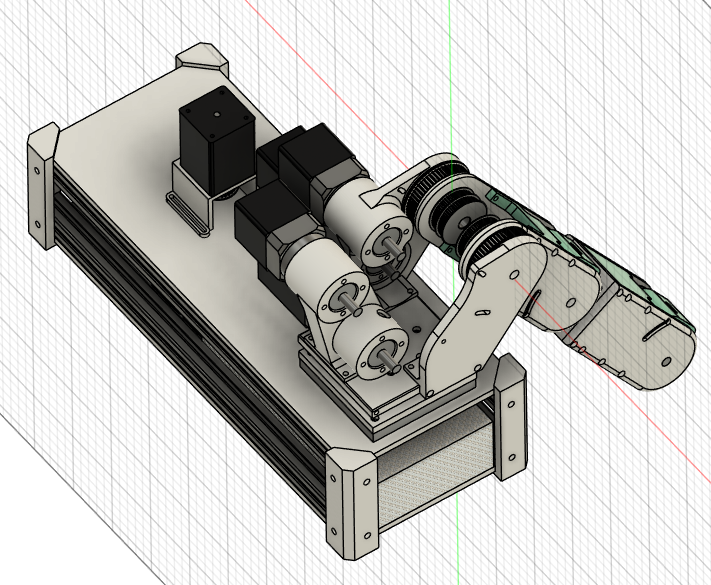
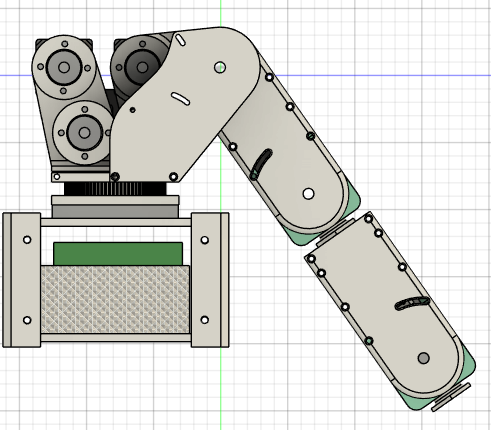
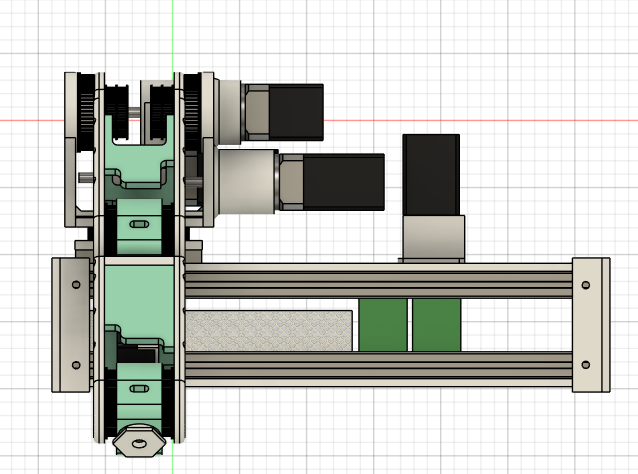
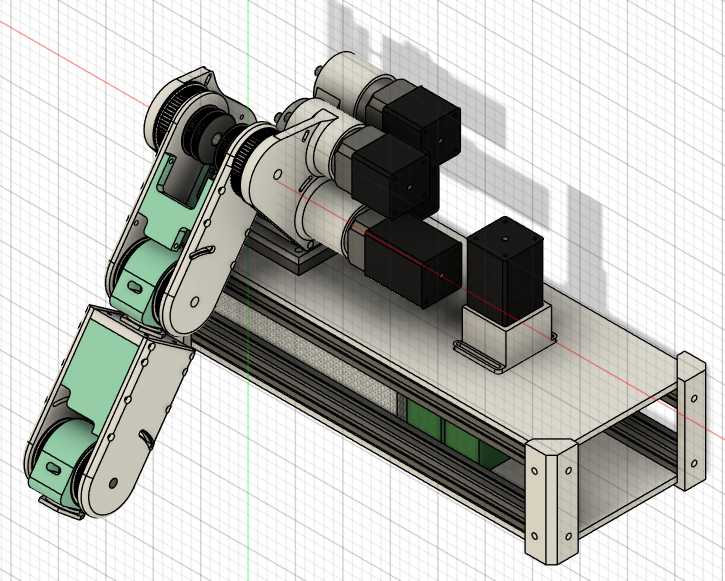
Hey! I'm making another quick update to the robot arm project. I am actually quite happy with the progress I am making given how overwhelmingly busy I have been with all the other stuff in my life. But that doesn't matter. The video shows off some of the changes I need to make to the shoulder/elbow assembly. I really made some silly mistakes on that one but I am genuinely quite optimistic about the whole thing. One thing I didn't mention in the video is that I think I want to switch back to clamping onto the shoulder shaft instead of just press fitting them. On the elbow and wrist joints it woks fine but on the shoulder it is really cumbersome and not fun to work on. I will almost certainly run into more problems as I go but I am genuinely hopeful that I won't have to buy more parts to get this up and running. Here are some more CAD drawings of what the arm should look like when completed. This is before the redesign though so it is subject to change. Oh also my master plan is to totally redesign everything eventually using brushless DC motors, magnetic encoders, and strain wave gearing in addition to the current pulley system. This is extremely necessary for my (as of yet undetermined) use case and will not cost a small fortune.